
Code: Select all
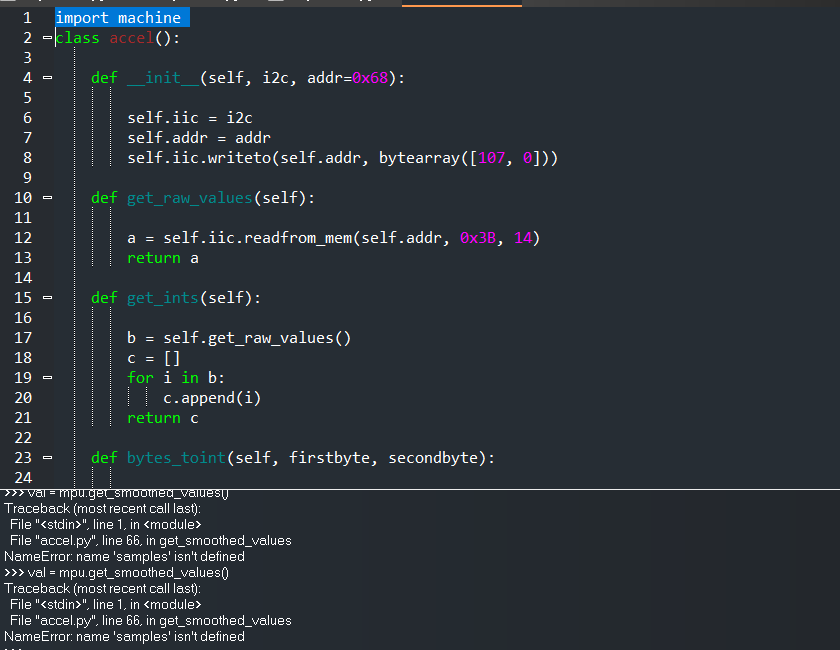
import machine
class accel():
def __init__(self, i2c, addr=0x68):
self.iic = i2c
self.addr = addr
self.iic.writeto(self.addr, bytearray([107, 0]))
def get_raw_values(self):
a = self.iic.readfrom_mem(self.addr, 0x3B, 14)
return a
def get_ints(self):
b = self.get_raw_values()
c = []
for i in b:
c.append(i)
return c
def bytes_toint(self, firstbyte, secondbyte):
if not firstbyte & 0x80:
return firstbyte << 8 | secondbyte
return - (((firstbyte ^ 255) << 8) | (secondbyte ^ 255) + 1)
def get_values(self):
raw_ints = self.get_raw_values()
vals = {}
vals["AcX"] = self.bytes_toint(raw_ints[0], raw_ints[1])
vals["AcY"] = self.bytes_toint(raw_ints[2], raw_ints[3])
vals["AcZ"] = self.bytes_toint(raw_ints[4], raw_ints[5])
vals["Tmp"] = self.bytes_toint(raw_ints[6], raw_ints[7]) / 340.00 + 36.53
vals["GyX"] = self.bytes_toint(raw_ints[8], raw_ints[9])
vals["GyY"] = self.bytes_toint(raw_ints[10], raw_ints[11])
vals["GyZ"] = self.bytes_toint(raw_ints[12], raw_ints[13])
return vals # returned in range of Int16
# -32768 to 32767
def get_smoothed_values(self, n_samples=10):
result = self.get_values()
for _ in range(0, n_samples - 1):
data = self.get_values()
for key in data.keys():
result[key] += data[key]
for key in data.keys():
result[key] /= n_samples
return result
def calibrate(self, threshold=50, n_samples=100):
while True:
v1 = self.get_smoothed_values(n_samples)
v2 = self.get_smoothed_values(n_samples)
# Check all consecutive measurements are within
# the threshold. We use abs() so all calculated
# differences are positive.
if all(abs(v1[key] - v2[key]) < threshold for key in v1.keys()):
return v1 # Calibrated.
# ONLY FOR TESTING! Also, fast reading sometimes crashes IIC
def val_test(self):
from time import sleep
while 1:
print(self.get_values())
sleep(0.05)

{kind=link}