Re: Bioloid Quad Walker Robot - Roz
Posted: Tue Jan 26, 2021 2:28 pm
So I've started working on Roz again - redid everything this time. New chassis (3D printed), all new electronics and sensors, etc. The main compute engine for the robot is a raspberry pi zero running Python, but I have two MicroPython boards on the robot.
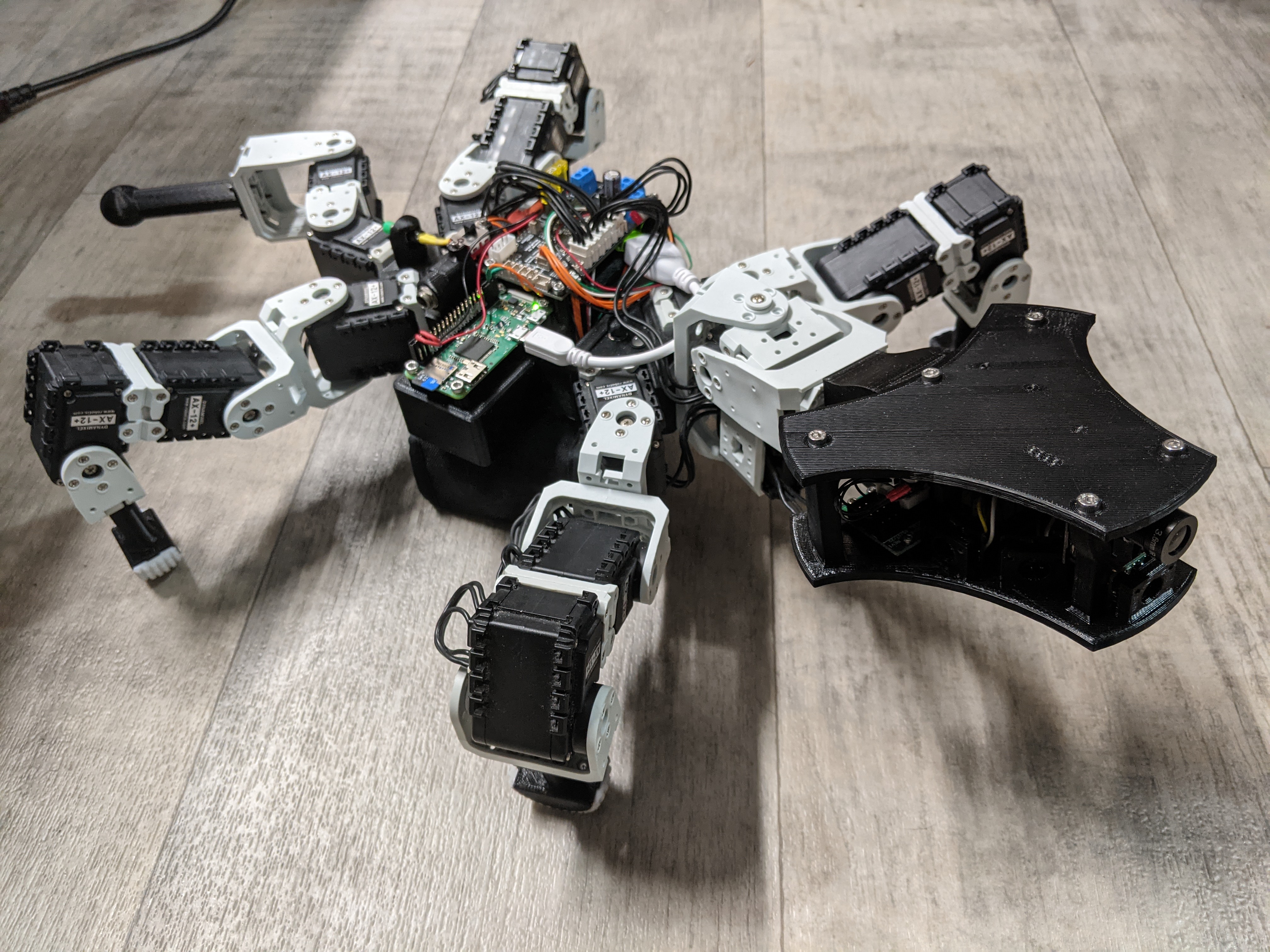
The first MicroPython board handles power, allowing me to hot-swap between battery power and wall power without worrying about having wall power affect the battery. It also handles powering up the robot using a simple push-button (like most modern consumer electronics products).
The second MicroPython board is in the head, and is a device on the Bioloid servo bus, and handles all the sensors in the head (except the camera). It talks to five VL53L1X lidar sensors, as well as a 9-axis IMU board, and hopefully in the future an optical flow board.
Both MicroPython boards are Adafruit STM32F405 Feather Express boards.
The first MicroPython board handles power, allowing me to hot-swap between battery power and wall power without worrying about having wall power affect the battery. It also handles powering up the robot using a simple push-button (like most modern consumer electronics products).
The second MicroPython board is in the head, and is a device on the Bioloid servo bus, and handles all the sensors in the head (except the camera). It talks to five VL53L1X lidar sensors, as well as a 9-axis IMU board, and hopefully in the future an optical flow board.
Both MicroPython boards are Adafruit STM32F405 Feather Express boards.