Tote, a quadruped robot
Posted: Tue Apr 05, 2016 10:07 am
Tote is my effort for lowering the barrier of entry into the world of hobby robotics in general, and serious walking robots in particular. The idea is to provide a starting point for building your robot, that would get you through the initial hurdle of figuring out the mechanics, inverse kinematics and gaits, but at the same time be affordable and easy to build out of off-the-shelf components.
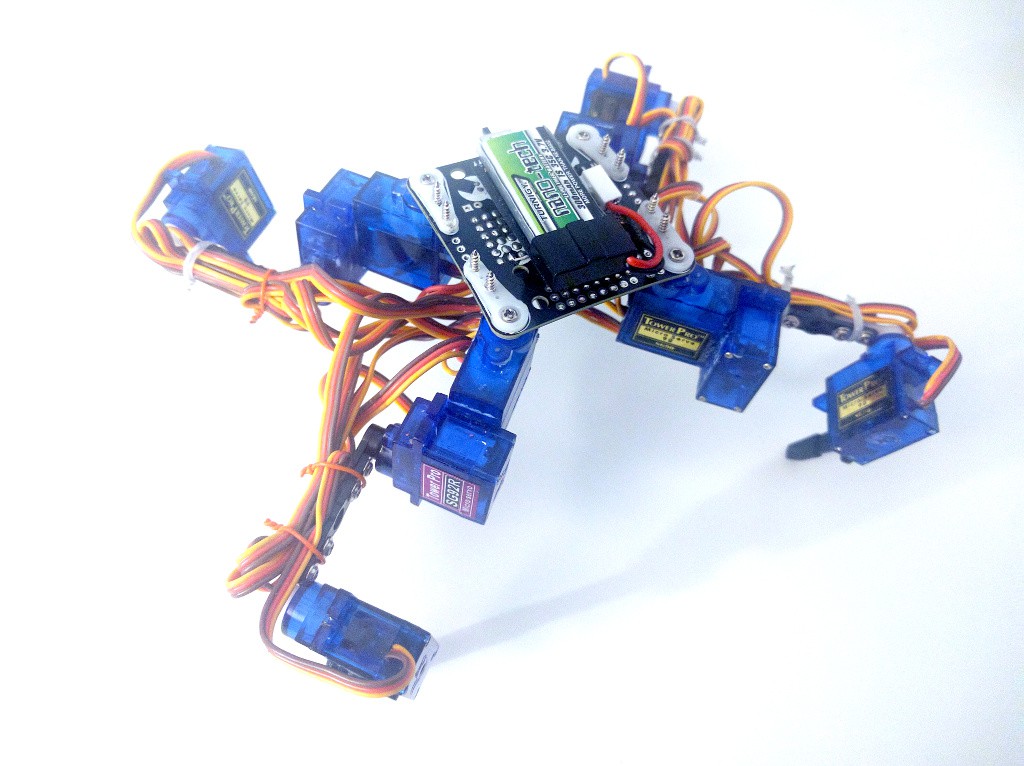
When I started the project, I really wanted to use Python for its programming, but the existing Micropython boards were way over my budget for this project, which I arbitrarily set at $30 for the whole thing. So the initial versions used a cheap Arduino clone for its brains. The ESP8266 port changes things dramatically, and I can now make Tote run Python programs. I still left the Arduino in there, to handle the low-level servo control and leg inverse kinematics, and also to interface with any additional sensors, but the main program runs on an ESP-01 module now. I just had the Micropython-based version take its first steps, and in a few days we will have a workshop building 25 more of these. Of course I'm going to improve the gait and keep developing the software.
More details about the project and the worklog is available at: https://hackaday.io/project/9927-tote-had and https://hackaday.io/project/6050-tote
When I started the project, I really wanted to use Python for its programming, but the existing Micropython boards were way over my budget for this project, which I arbitrarily set at $30 for the whole thing. So the initial versions used a cheap Arduino clone for its brains. The ESP8266 port changes things dramatically, and I can now make Tote run Python programs. I still left the Arduino in there, to handle the low-level servo control and leg inverse kinematics, and also to interface with any additional sensors, but the main program runs on an ESP-01 module now. I just had the Micropython-based version take its first steps, and in a few days we will have a workshop building 25 more of these. Of course I'm going to improve the gait and keep developing the software.
More details about the project and the worklog is available at: https://hackaday.io/project/9927-tote-had and https://hackaday.io/project/6050-tote