
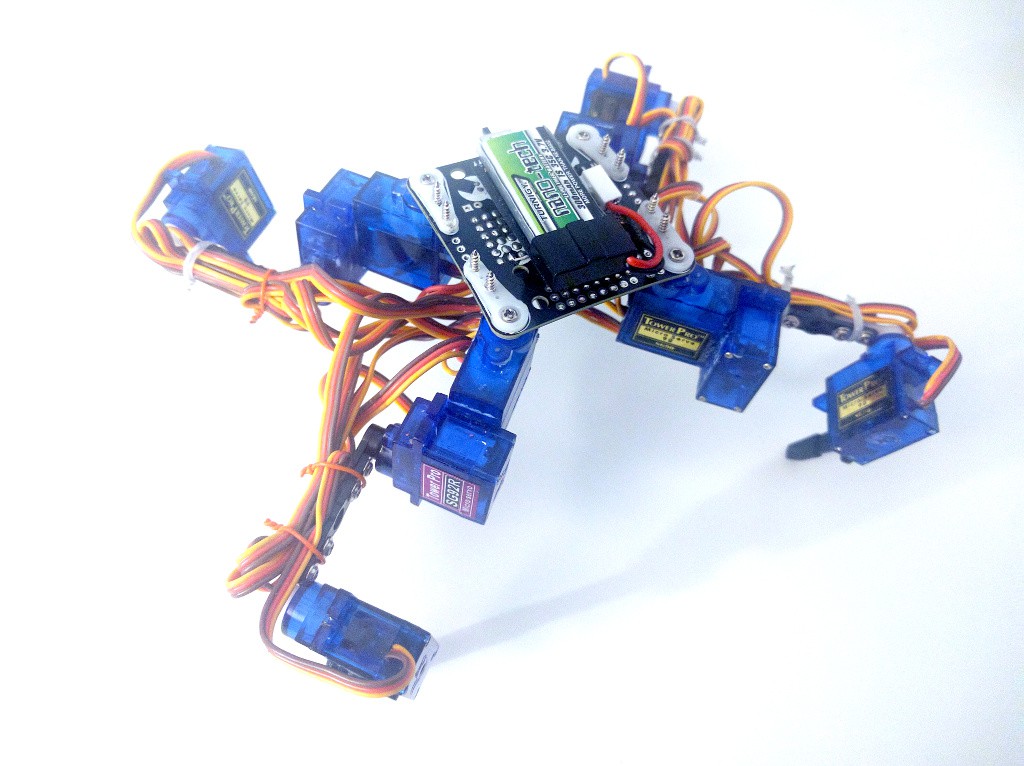
When I started the project, I really wanted to use Python for its programming, but the existing Micropython boards were way over my budget for this project, which I arbitrarily set at $30 for the whole thing. So the initial versions used a cheap Arduino clone for its brains. The ESP8266 port changes things dramatically, and I can now make Tote run Python programs. I still left the Arduino in there, to handle the low-level servo control and leg inverse kinematics, and also to interface with any additional sensors, but the main program runs on an ESP-01 module now. I just had the Micropython-based version take its first steps, and in a few days we will have a workshop building 25 more of these. Of course I'm going to improve the gait and keep developing the software.
More details about the project and the worklog is available at: https://hackaday.io/project/9927-tote-had and https://hackaday.io/project/6050-tote